

Diferència de rendiment del motor 1: velocitat/parell/mida
Hi ha tota mena de motors al món. Motors grans i motors petits. Un motor que es mou endavant i endarrere en comptes de girar. Un motor que a primera vista no és evident per què és tan car. Tanmateix, tots els motors es trien per alguna raó. Aleshores, quin tipus de motor, rendiment o característiques ha de tenir el vostre motor ideal?
L'objectiu d'aquesta sèrie és proporcionar coneixements sobre com triar el motor ideal. Esperem que us sigui útil a l'hora de triar un motor. I esperem que ajudi a la gent a aprendre els conceptes bàsics dels motors.
Les diferències de rendiment que s'explicaran es dividiran en dues seccions separades de la manera següent:
Velocitat/Parell motor/Mida/Preu ← Els elements que tractarem en aquest capítol
Velocitat, precisió/suavitat/vida útil i manteniment/generació de pols/eficiència/calor
Generació d'energia/vibracions i soroll/contramesures de gasos d'escapament/entorn d'ús
1. Expectatives per al motor: moviment de rotació
Un motor generalment fa referència a un motor que obté energia mecànica de l'energia elèctrica, i en la majoria dels casos fa referència a un motor que obté moviment de rotació. (També hi ha un motor lineal que obté moviment rectilini, però aquesta vegada ho deixarem de banda.)
Doncs, quin tipus de rotació vols? Vols que giri amb força com un trepant o vols que giri feblement però a alta velocitat com un ventilador elèctric? Centrant-nos en la diferència en el moviment de rotació desitjat, les dues propietats de la velocitat de rotació i el parell motor esdevenen importants.
2. Parell de torsió
El parell motor és la força de rotació. La unitat de parell motor és N·m, però en el cas de motors petits, s'utilitza habitualment mN·m.
El motor ha estat dissenyat de diverses maneres per augmentar el parell motor. Com més voltes tingui el cable electromagnètic, més gran serà el parell motor.
Com que el nombre de bobinatges està limitat per la mida fixa de la bobina, s'utilitza filferro esmaltat amb un diàmetre de filferro més gran.
La nostra sèrie de motors sense escombretes (TEC) amb 16 mm, 20 mm i 22 mm i 24 mm, 28 mm, 36 mm, 42 mm, els 8 tipus de mida de diàmetre exterior de 60 mm. Com que la mida de la bobina també augmenta amb el diàmetre del motor, es pot obtenir un parell més elevat.
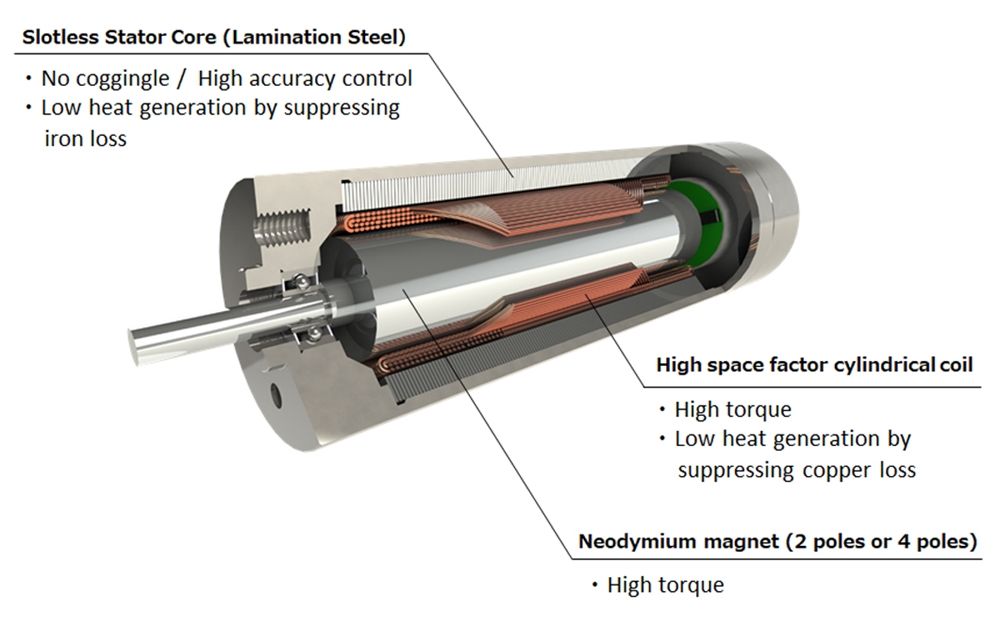
Els imants potents s'utilitzen per generar grans parells de gir sense canviar la mida del motor. Els imants de neodimi són els imants permanents més potents, seguits dels imants de samari-cobalt. Tanmateix, fins i tot si només utilitzeu imants forts, la força magnètica es filtrarà fora del motor i la força magnètica que es filtra no contribuirà al parell de gir.
Per aprofitar al màxim el fort magnetisme, es lamina un material funcional prim anomenat placa d'acer electromagnètica per optimitzar el circuit magnètic.
A més, com que la força magnètica dels imants de samari i cobalt és estable als canvis de temperatura, l'ús d'imants de samari i cobalt pot impulsar el motor de manera estable en un entorn amb grans canvis de temperatura o temperatures elevades.
3. Velocitat (revolucions)
El nombre de revolucions d'un motor sovint es coneix com a "velocitat". És el rendiment de quantes vegades gira el motor per unitat de temps. Tot i que "rpm" s'utilitza habitualment com a revolucions per minut, també s'expressa com a "min-1" en el sistema d'unitats SI.
En comparació amb el parell motor, augmentar el nombre de revolucions no és tècnicament difícil. Simplement reduïu el nombre de voltes de la bobina per augmentar el nombre de voltes. Tanmateix, com que el parell motor disminueix a mesura que augmenta el nombre de revolucions, és important complir els requisits tant de parell motor com de revolucions.
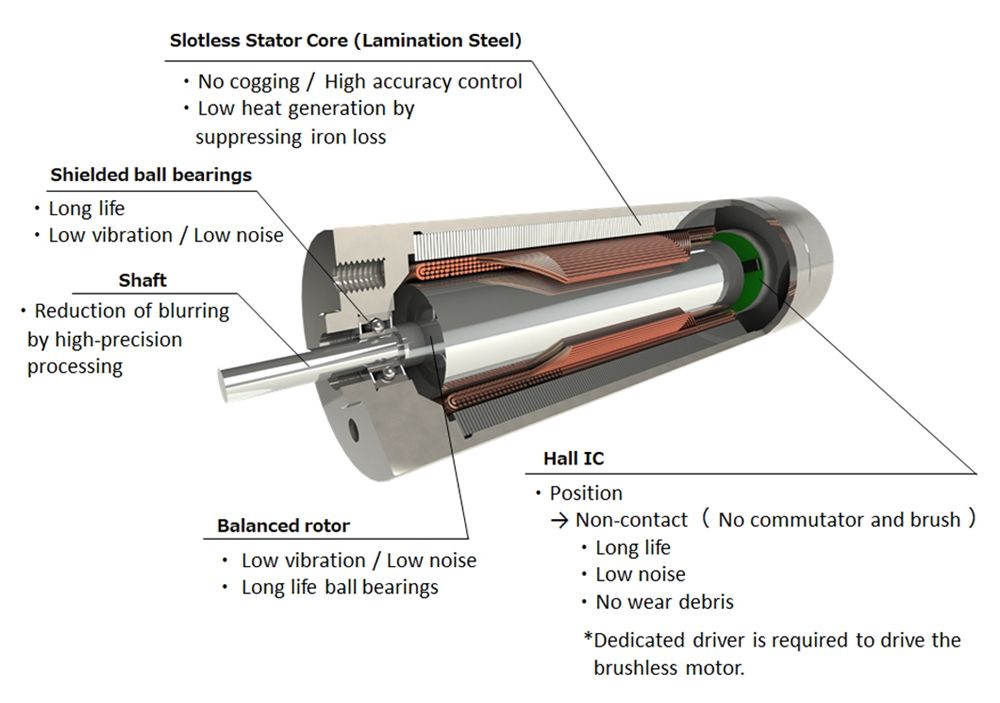
A més, si s'utilitza a alta velocitat, és millor utilitzar rodaments de boles en lloc de rodaments llisos. Com més alta sigui la velocitat, més gran serà la pèrdua de resistència a la fricció i, per tant, més curta serà la vida útil del motor.
Depenent de la precisió de l'eix, com més alta sigui la velocitat, més grans seran els problemes relacionats amb el soroll i les vibracions. Com que un motor sense escombretes no té ni escombretes ni commutador, produeix menys soroll i vibracions que un motor amb escombretes (que posa la escombreta en contacte amb el commutador giratori).
Pas 3: Mida
Quan es tracta del motor ideal, la mida del motor també és un dels factors importants del rendiment. Fins i tot si la velocitat (revolucions) i el parell motor són suficients, no té sentit si no es pot instal·lar al producte final.
Si només voleu augmentar la velocitat, podeu reduir el nombre de voltes del cable, fins i tot si el nombre de voltes és petit, però tret que hi hagi un parell de gir mínim, no girarà. Per tant, cal trobar maneres d'augmentar el parell de gir.
A més d'utilitzar els imants potents esmentats, també és important augmentar el factor de cicle de treball del bobinatge. Hem estat parlant de reduir el nombre de bobinatges de cable per garantir el nombre de revolucions, però això no vol dir que el cable estigui enrotllat de manera fluixa.
Si s'utilitzen cables gruixuts en comptes de reduir el nombre d'espirals, es poden fer circular grans quantitats de corrent i es pot obtenir un parell elevat fins i tot a la mateixa velocitat. El coeficient espacial és un indicador de la força amb què s'enrotlla el cable. Tant si es tracta d'augmentar el nombre d'espirals primes com de reduir el nombre d'espirals gruixudes, és un factor important per obtenir el parell.
En general, la potència d'un motor depèn de dos factors: el ferro (imant) i el coure (bobinat).
Data de publicació: 21 de juliol de 2023